Optimised laser Cleaning for Safe Nuclear Decontamination and Decommissioning
The 2011 disaster at the Fukushima Daiichi Nuclear Power Station resulted in severe damage to three of its six reactors, marking the beginning of one of the most challenging nuclear clean-up endeavours in history. The massive earthquake and subsequent tsunami, which instigated the catastrophic failure, led to a loss of cooling, core meltdowns, and the release of radioactive materials. The enduring complexity and risk associated with these damaged reactors necessitate a range of novel decontamination solutions. To this end, we present OptiClean (‘Optimized laser Cleaning for Safe Nuclear Decontamination and Decommissioning’), an innovative synergy of robotics, laser cleaning, and water mist filtration for decontaminating the Fukushima Daiichi reactor pressure vessels (RPVs).
As part of the JUNO Phase 8 program, the University of Bristol (UK), Imperial College London (UK), ATOX (Japan), and the University of Tokyo (Japan) have been collaborating to develop the OptiClean system. Herein, we present our results from recent trial deployments with ATOX, utilizing
their full-scale mock-up of a reactor well, and from similar deployments at PAR Systems in the UK. Central to the OptiClean system is its mist-mitigated laser cleaning technology, which has been designed for selective and efficient nuclear contaminant ablation and atmospheric sequestration. Surface contaminants are removed using the well-established methods of laser cleaning, with any resultant airborne contaminants removed with our tailor-made atmospheric mist filtration solution. Based upon extensive academic research, this mist system effectively captures, confines, and removes airborne radioactive particles for processing in existing waste treatment systems. This not only boosts decontamination efficiency but also addresses some of the challenges pertaining to secondary waste generation and nuclear waste management.
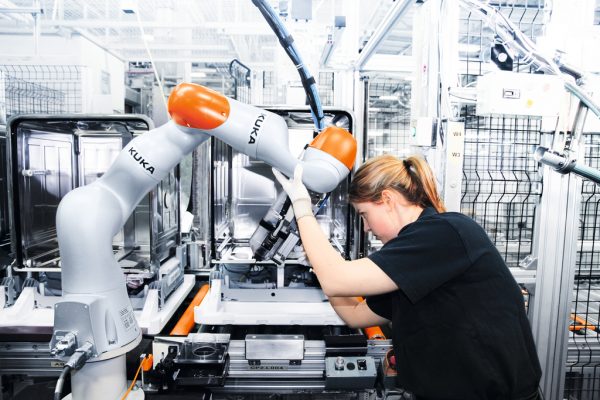
To demonstrate the potential deployment of the OptiClean system in Fukushima’s RPVs, a Hot Robotics KUKA LBR Iiwa robotic arm has been affixed to custom-made, orthogonally connected aluminium A-frames. The innovative A-frame upon which the robotic arm is mounted assures an optimal and precise cleaning range, vital for decontamination in such challenging nuclear contexts. The OptiClean cleaning head and mist system were attached to the end of the robotic arm, allowing for remote operation and cleaning. The setup was lowered into the ATOX mock-up well with the aid of an overhead crane.
Once inside the well, self-monitoring suction feet enabled the system to securely anchor to the wall. Utilizing the Venturi effect (via compressed air), these feet eliminate the potential need for direct suction and the risks associated with extracting contaminated air. Moreover, the built-in monitors on each foot shut off the compressed air once a stable seal is established, minimizing air turbulence and the associated risks of contamination dispersal.
This research explores the innovative challenges and opportunities tied to the OptiClean system’s deployment. With combined efforts from the University of Bristol, UTokyo, and ATOX, this system signifies a landmark advancement in merging robotics and pioneering laser cleaning technologies for decommissioning in the nuclear sector. Insights from these deployments will be presented, emphasizing the ground breaking potential of the OptiClean system, especially in environments with critical contamination levels akin to those found at Fukushima Daiichi.



Evaluation of the Opticlean Robotic Laser Cleaning System for Deployments at Fukushima Daiichi
David Megson-Smith, Thomas Bennett, Kohei Shibata, Shuichiro Miwa, Jonny Teague, Tom Scott