Combined Ground & Aerial Autonomous Robotics Platform for Complex Decontamination
The University of Bristol’s Hot Robotics Facility has developed a comprehensive solution to spray-based urban decontamination and sampling. Through a combination of ground and aerial vehicles, this system utilises robotics to assist humans with urban decontamination, improving safety, efficiency and speed.
The system, called CERBERUS, has been designed to operate in complex urban areas and overcome challenging environmental factors, categorised by a diversity of surfaces, obstacles and geometry. The system has been tested at an urban training compound in the UK, which provided a wide variety of mock scenarios and challenges.
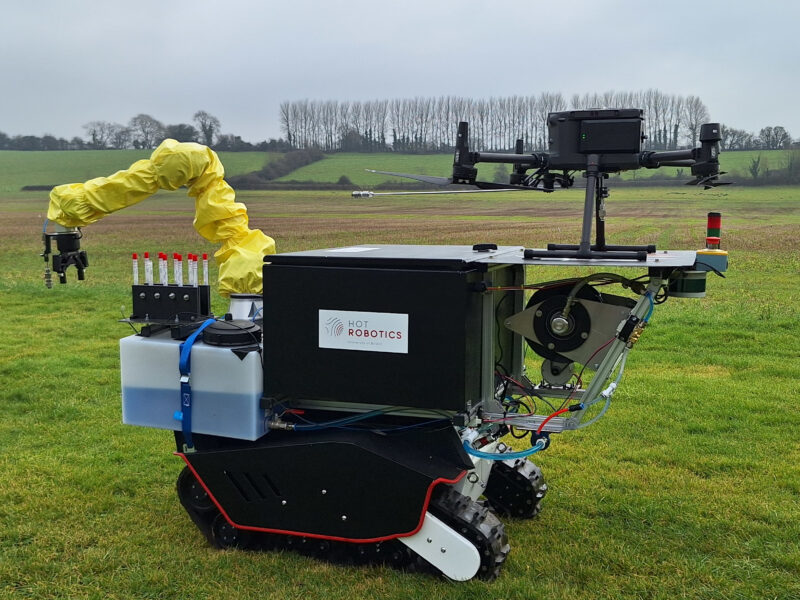
The CERBERUS system features commercial off-the-shelf (COTS) UGV, UAS and a robotic manipulator arm, along with a custom spray system for effective decontamination. The design enables access to elevated surfaces, the supporting of heavy payloads and the ability to operate autonomously for long periods of time without having to return to a home base for refuelling or charging.
The chosen UGV for the CERBERUS is the Agile X Bunker Pro, due to it having a 120kg payload capacity, a 3kWh battery to allow for extended operation, and is IP67 rated for use in adverse conditions. The base unit weighs 180kg, and the deeply grooved tracks ensure the unit remains stable and manoeuvrable on difficult terrain.
The robotic manipulator is mounted at the front of the robot: a six-degree of freedom Universal Robots UR5e. The manipulator has a 5kg payload and the OEM version chosen for this project is driven by a small control box which communicates with the rest of the systems. Six degrees of freedom is necessary for the manipulator to be able to achieve spray paths around the complex geometry that is found in urban areas. The manipulator is only rated to IP54, so has been sheathed in a water-resistant coat to prevent damage from liquid spray. The end effector of the manipulator is comprised of two tools; a Robotiq 2f-85 gripper used to pick up and hold swabs, and a custom designed spray arm for linear application of decontaminant.
The CERBERUS system prototype demonstrates the feasibility of spray decontamination from both ground and elevated positions, but there are a number of proposed future works which may tailor decontamination efforts for a variety of scenarios.
Comprehensive robotic decontamination solutions are possible, however future work to significantly develop autonomy and robustness, as well as further testing of the validity of decontamination techniques in different scenarios is necessary before these systems can replace humans in real-world scenarios. Field trials such as the ones completed by the CERBERUS robot described here are invaluable at providing realistic testing grounds to assess which aspects of decontamination robots struggle with most. To achieve the most productive results these trials should be repeated at regular intervals to allow progress of robotic development to be measured. Decontamination remains a complex field, but with continued effort, it is feasible that robots will support certain aspects of this task from human intervention, ultimately improving safety and reducing response times.
Acknowledgments
The Hot Robotics facility acknowledge funding from UK Department for the Environment, Food and Rural Affairs (DEFRA) working with the UK Defence Science and Technology Laboratory (DSTL) under the National Technical Advisory Group for Chemical, Biological & Radiological Recovery (NTAG-R) project.






