Cooperative Aquatic Vehicle Exploration System (CAVES) for confined underwater spaces
The University of Manchester is developing a Cooperative Aquatic Vehicle Exploration System (CAVES) for confined underwater spaces. The CAVES project contains many subparts and is assigned to several PhD/postdoc projects; optical wireless communication is one of the main elements.
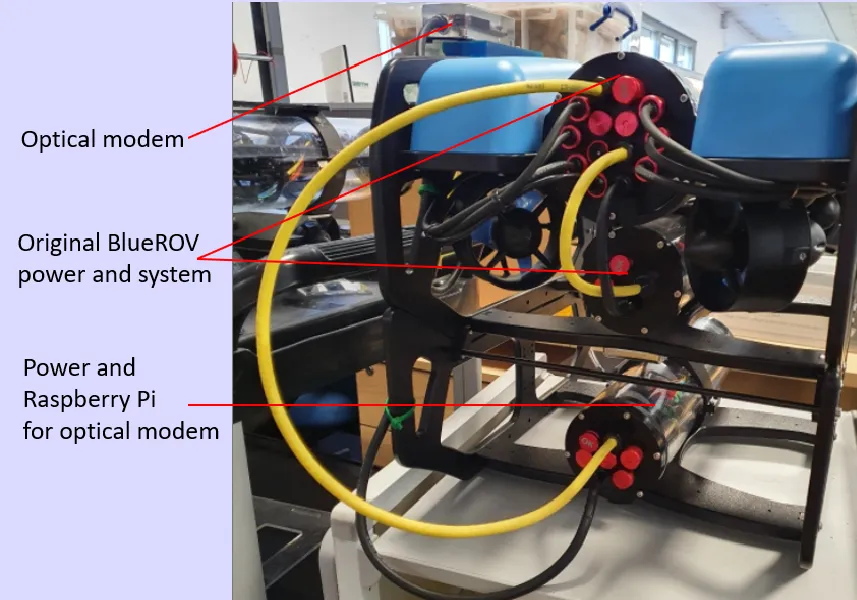
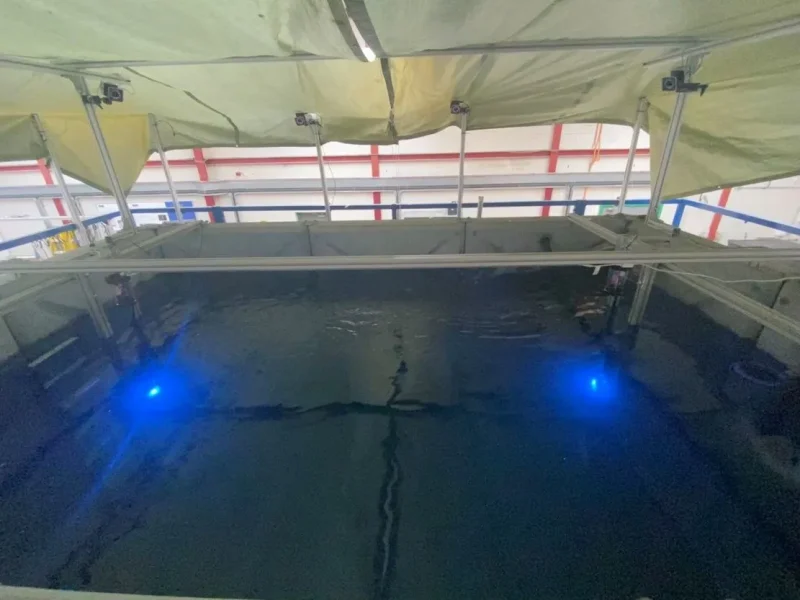
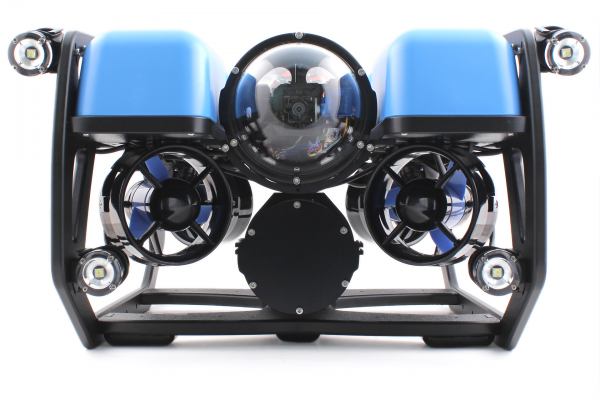
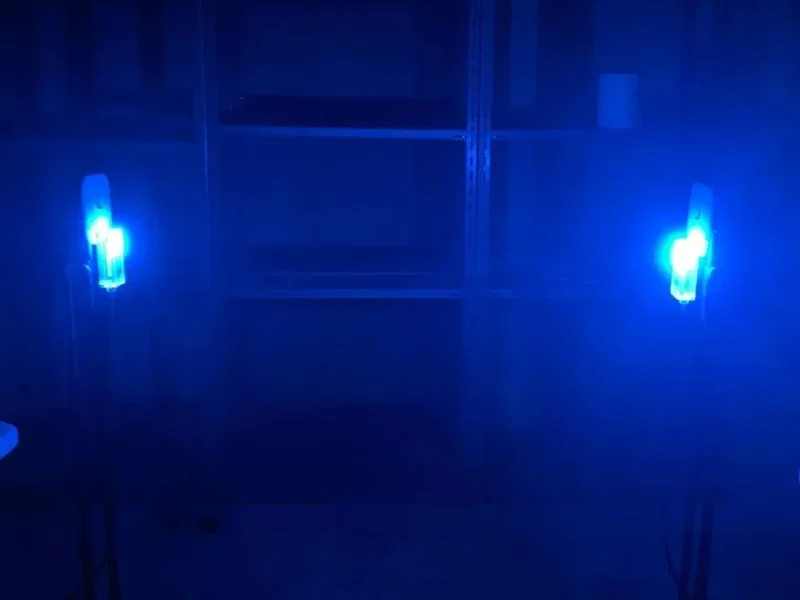
The aim is to achieve underwater wireless communication using the Hydromea optical modem. One BlueROV2 robot has been made wireless at the Robotics for Extreme Environments Lab (REEL) in Cumbria. Some levels of characterisation were also carried out to determine the capability of such system both in air and underwater for future deployment. The project was able to conduct this research by using the tank, Hydromea and BlueROV2 available from the National Nuclear User Facility for Hot Robotics (NNUF-HR) at The University of Manchester’s RAICo One.
The next stage of work will be deploying the system onto a surface-subsurface multi-agent robot platform to achieve full wireless communication in robot-robot and human-robot during operation.